
A cooperação romana se concentra em melhorar os sistemas sábios trabalhando em conjunto com pessoas em áreas poderosas. Os pesquisadores pretendem criar robôs que possam entender e praticar comandos ambientais, permitindo questões como posição local, equipamentos e equipamentos. Este campo enriquece a habitação, os cuidados de saúde e as condições industriais de Roberts, onde a eficiência e a flexibilidade são essenciais para costuras sem costuras.
O maior desafio em Robot-Robot é a falta de avaliação completa da consulta de planejamento e habilidades em muitos agentes. Enquanto os modelos anteriores se concentraram em vagabundos e uma parceria, eles não conseguiram manter a cultura mundial real quando os robôs deveriam interagir com as pessoas. Muitos dos métodos não estão respondendo a um rastreamento em tempo real, adaptação à parceria e reembolsos de erros. A ausência das escalas padrão dificulta a verificação e melhoria as operações da IA em ciberbanas sistemáticas.
Os métodos atuais de IA da mídia geralmente se concentram no assassinato de um trabalho, desprezando a integração da comunicação em muitos agentes. Outros métodos dependem das instruções da atividade de escravos, variações e empregos restritos, enquanto outros estão sujeitos à avaliação das atividades de teste prescritas, fazendo uma série de avaliação ilegal. Apesar do desenvolvimento, os principais modos de estado (LLMs) estão lutando pelo trabalho, coordenação e recuperação da execução. Isso estimou que sua capacidade de funcionar adequadamente em áreas poderosas – onde mudanças de condições e trabalhos são importantes.
Os investigadores da Fair Meta apresentaram Partnrs (atividades de planejamento e consulta em robôs), um benchmark grande projetado para examinar a comunicação das pessoas nas áreas de robô feitas de robô. O Partnr inclui 100.000 obras de natureza, girando 60 coisas e itens diferentes de 5.819. A referência avaliou especialmente atividades que incluem localização, temporário e indústria. Os investigadores confirmam o processo de comprometimento real e de comprometimento. O Partnr visa definir o padrão para avaliar o poder da IA de trabalhar com parceiros humanos de maneira eficaz.
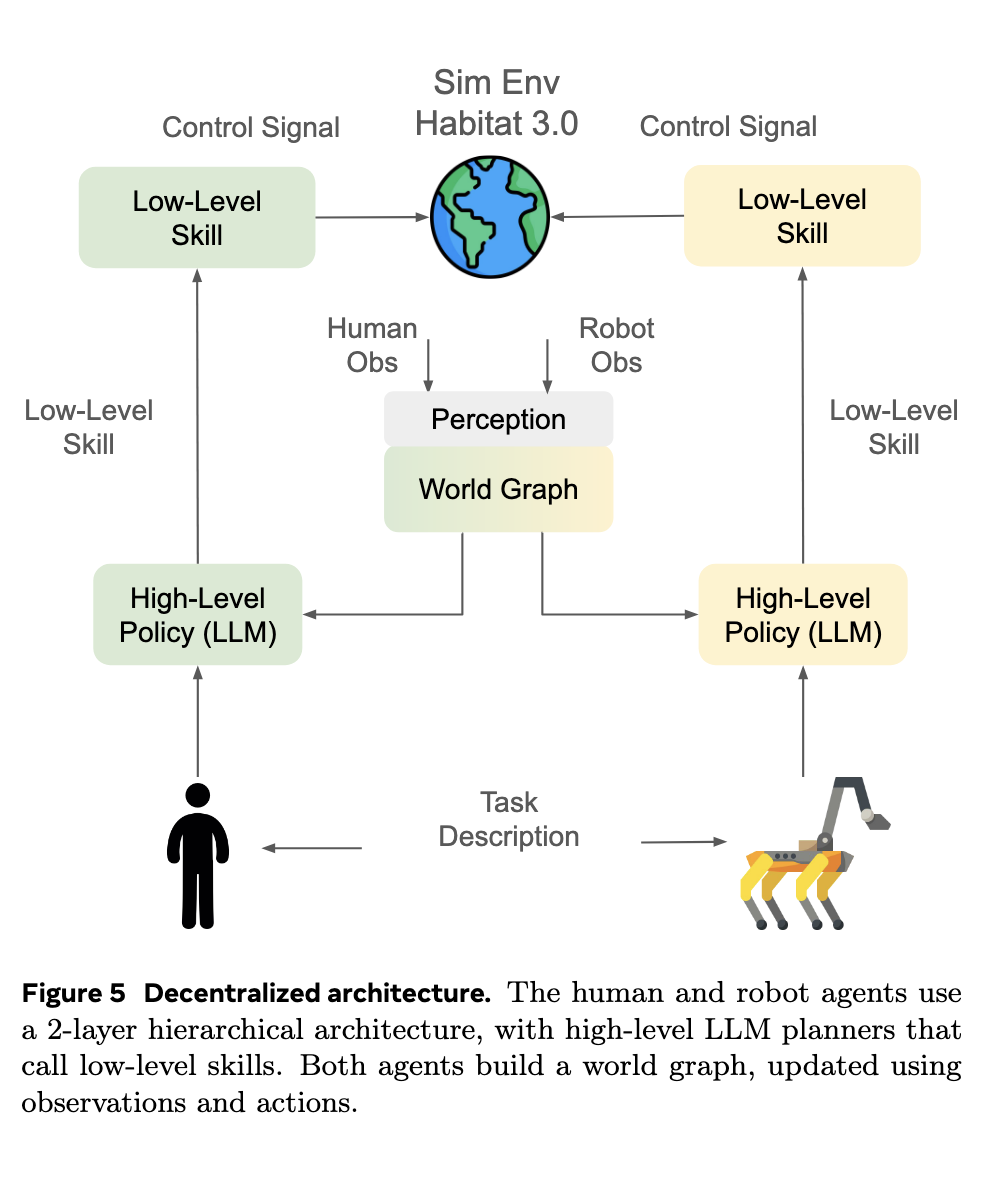
Os investigadores produzem funções e atividades de avaliação usando LLMs para criar um banco. Estes são classificados imitando para remover tarefas invisíveis. Último conjunto de dados A confiração submetida de uma pessoa no loop para melhorar os trabalhos e garantir a precisão. Os trabalhos do Partnr caíram em quatro categorias: estresse, local, temporariamente e heterogêneo. As atividades funcionais gratuitas permitem a ordem de matar, e as atividades locais exigem que algo permaneça. As tarefas temporárias precisam ser realizadas e obras heterogêneas incluem ações além do controle dos robôs, que exigem intervenção de alguém. Essas estruturas de trabalho apresentam desafios para vincular, rastrear a trilha e a precisão da execução.
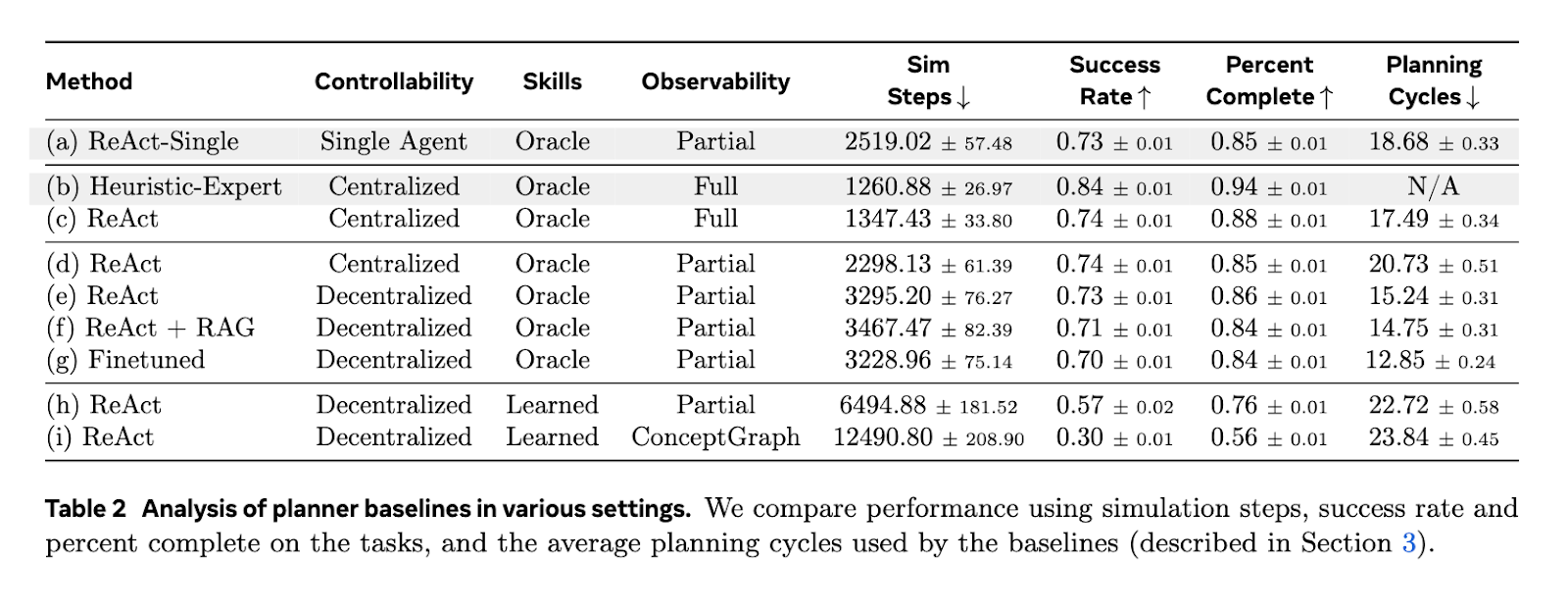
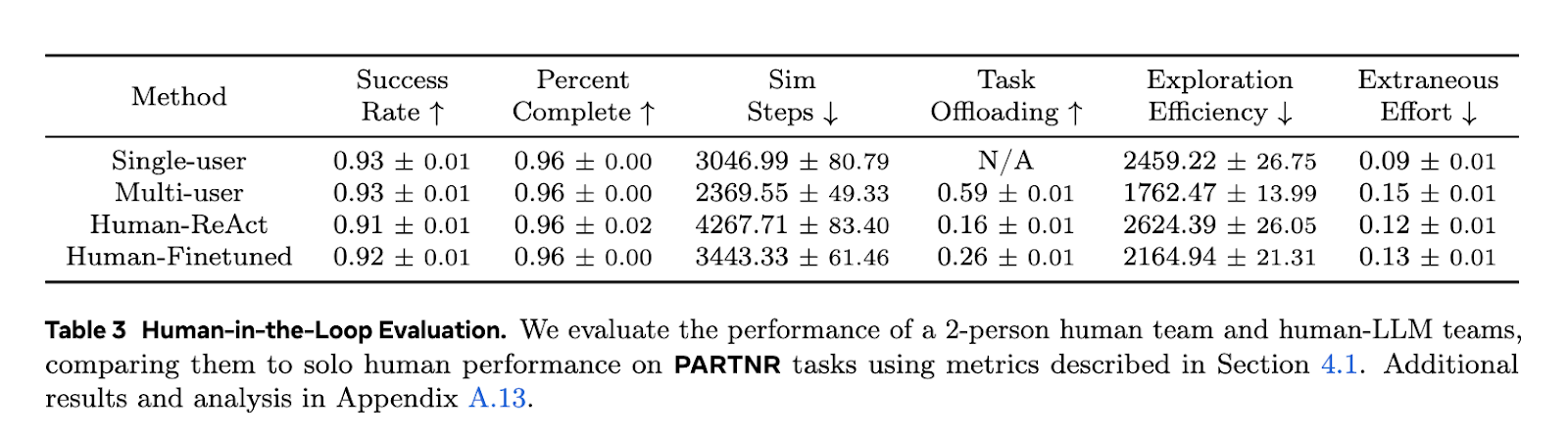
O teste das agências de planejamento LLM no Partnr apresentou restrições importantes nos links, funcionamento e a restauração do erro. Quando um casal, robôs sob os robôs guiados LLM em mais vezes há grupos de pessoas e 1,1 vezes mais de uma pessoa para concluir empregos. A taxa de sucesso do Strate-of-Art LLMS foi de apenas 30% em condições não-direito, em comparação com os 93% quando os empregos são realizados apenas por pessoas. Além disso, o bom pequeno LLMS atingiu o desempenho em comparação com os modelos nove vezes, enquanto acelera até 8,6 vezes a velocidade. Em muitos agentes, a eliminação de trabalhos é necessária 1,3 vezes em um único agente, o que indica o desemprego na comunicação atual.
O Partnr destaca espaços importantes nos modelos de IA existentes do AI-Robot, enfatizando um melhor planejamento, rastreamento e estratégias para tomar decisões. Os resultados indicam que, apesar do desenvolvimento da IA, os benchmarks interativos de robô humano precisam de uma grande melhoria das diferenças de incapacidade entre a IA e as pessoas. A estrutura de teste editada fornecida pelo Partnr fornece, de forma a promover bem as habilidades, o planejamento e as tarefas da IA. Pesquisas futuras devem se concentrar em digitar os aviões baseados em LLM, melhorar os métodos de coordenação e melhorar os modelos de compreensão para lidar com os limites atuais da comunicação com base em vários baseados em ALENT. O Partnr é uma ferramenta importante para a nova direção no sistema de IA combinado de IA combinado.
Enquete o papel. Todo o crédito deste estudo é pesquisado para este projeto. Além disso, não se esqueça de seguir Sane e junte -se ao nosso Estação de telégrafo incluindo LinkedIn grtópico. Não se esqueça de se juntar ao nosso 75k + ml subreddit.
🚨 Recomendado para um código aberto de IA' (Atualizado)
Nikhil é um estudante de estudantes em Marktechpost. Perseguindo graduados integrados combinados no Instituto Indiano de Tecnologia, Kharagpur. Nikhl é um entusiasmo de interface do usuário / ml que procura aplicativos como biomotomentores e ciências biomédicas. Após um sólido na ciência material, ele examina novos empreendimentos e desenvolvendo oportunidades de contribuir.
✅ [Recommended] Junte -se ao nosso canal de telégrafo


